spfilteR: Semiparametric Spatial Filtering with Eigenvectors in (Generalized) Linear Models
Sebastian Juhl
2025-12-19
Source:vignettes/spfilteR_vignette.Rmd
spfilteR_vignette.RmdIntroduction
The spfilteR package provides tools to implement the
eigenvector-based spatial filtering (ESF) approach put forth by Griffith (2003) in linear and generalized linear
regression models. It allows users to obtain eigenvectors from a
transformed connectivity matrix and supports the supervised and
unsupervised creation of a synthetic spatial filter. For the
unsupervised approach, eigenvectors can be selected based on either i)
the maximization of model fit, ii) the minimization of residual
autocorrelation, iii) the statistical significance of residual
autocorrelation, or iv) the significance level of candidate
eigenvectors. Alternatively, all eigenvectors in the search set may be
included so that no selection takes place. While the functions provide a
high flexibility, only a minimum of code is required to implement the
unsupervised ESF approach.
This vignette solely focuses on the workflow to illustrate the
functionality of the spfilteR package. For a discussion on
the ESF methodology, interested readers may be referred to other
sources, e.g., Griffith, Chun, and Li
(2019) or Tiefelsdorf and Griffith
(2007).
Installation
A stable release version of the spfilteR package is
available on CRAN and the latest development version can be downloaded
from GitHub.
# CRAN release
install.packages("spfilteR")
# GitHub
library(devtools)
devtools::install_github("sjuhl/spfilteR")Getting Started
Together with the main functions, the package contains an artificial
dataset (fakedataset) and a connectivity matrix
(W) connecting the 100 cross-sections on a regular grid by
using the rook criterion of adjacency. For illustrative purposes, the
following examples utilize the fake dataset.
# load the package
library(spfilteR)
# load the dataset
data("fakedata")
# take a look at the connectivity matrix and the variables
dim(W)
#> [1] 100 100
head(fakedataset)
#> ID indicator count x1 x2 x3 negative negcount
#> 1 1 0 0 11.29514 5.527426 6.6406409 -2.338103 9
#> 2 2 0 4 13.92705 7.047870 4.0049350 -2.048737 3
#> 3 3 1 1 17.31431 10.525834 -0.7022595 -1.868379 5
#> 4 4 1 4 15.21778 7.817901 1.5948141 -2.737914 2
#> 5 5 1 3 15.56298 7.903947 -1.2708973 -1.117427 2
#> 6 6 1 2 17.43941 11.254842 -1.4158475 1.577442 2Besides an ID variable, the dataset contains a binary
indicator variable, two count variables, and four
continuous variables.
Identifying Spatial Autocorrelation
In a first step, the function MI.vec() checks for the
presence of spatial autocorrelation in the continuous variables by means
of Moran’s I (see also Cliff and Ord
1981, 1972). The function further allows users to define the
alternative hypothesis in order to obtain p-values.
# select continuous variables
cont <- cbind(fakedataset$x1, fakedataset$x2, fakedataset$x3, fakedataset$negative)
colnames(cont) <- c("x1", "x2", "x3", "negative")
# Moran test of spatial autocorrelation
(I <- MI.vec(x = cont, W = W, alternative = 'greater'))
#> I EI VarI zI pI
#> x1 0.311178214 -0.01010101 0.005344193 4.3948248 5.543107e-06 ***
#> x2 0.168757531 -0.01010101 0.005344193 2.4466317 7.209904e-03 **
#> x3 0.009112739 -0.01010101 0.005344193 0.2628276 3.963417e-01
#> negative -0.244064424 -0.01010101 0.005344193 -3.2004192 9.993139e-01The output suggests that the variables x1 and
x2 are positively autocorrelated at conventional levels of
statistical significance. Moreover, the standardized value of Moran’s
I (zI) indicates that the variable
negative is negatively autocorrelated. We can use the
function MI.vec() and specify
alternative = 'lower' to assess the significance of the
negative autocorrelation:
MI.vec(x = fakedataset$negative, W = W, alternative = 'lower')
#> I EI VarI zI pI
#> 1 -0.2440644 -0.01010101 0.005344193 -3.200419 0.0006861391 ***Since the Moran coefficient is a global measure of spatial
autocorrelation, spatial heterogeneity constitutes a problem for this
statistic. More specifically, the simultaneous presence of positive and
negative spatial autocorrelation at different scales cannot be revealed
by the classical Moran’s I. To circumvent this problem, the
function MI.decomp() decomposes the Moran coefficient into
a positively and a negatively autocorrelated part and performs a
permutation procedure to assess the significance (Dray 2011):
# decompose Moran's I
(I.dec <- MI.decomp(x = cont, W = W, nsim=100))
#> I+ VarI+ pI+ I- VarI- pI-
#> x1 0.3894789 0.001510352 0.00990099 ** -0.0783007 0.001816847 1.00000000
#> x2 0.3048369 0.001983860 0.01980198 * -0.1360794 0.001601069 0.98019802
#> x3 0.2247566 0.001641282 0.32673267 -0.2156438 0.002056313 0.39603960
#> negative 0.1131614 0.001924842 0.99009901 -0.3572259 0.001901218 0.00990099
#> pItwo.sided
#> x1 0.01980198 *
#> x2 0.03960396 *
#> x3 0.65346535
#> negative ** 0.01980198 *Note that the global Moran’s I is the sum of I+
and I-:
# I = 'I+' + 'I-'
cbind(I[, "I"], I.dec[, "I+"] + I.dec[, "I-"])
#> [,1] [,2]
#> [1,] 0.311178214 0.311178214
#> [2,] 0.168757531 0.168757531
#> [3,] 0.009112739 0.009112739
#> [4,] -0.244064424 -0.244064424Unsupervised Spatial Filtering in Linear Models
Assume that we wish to regress x1 on x2 and
test for residual autocorrelation using the function
MI.resid().
# define variables
y <- fakedataset$x1
X <- cbind(1, fakedataset$x2)
# OLS regression
ols.resid <- resid(lm(y ~ X))
# Moran test of residual spatial autocorrelation
MI.resid(resid = ols.resid, W = W, alternative = 'greater')
#> I EI VarI zI pI
#> 1 0.350568 -0.01010101 0.005344193 4.933643 4.035495e-07 ***The results show that the residuals are significantly autocorrelated
which violates the assumption of uncorrelated errors. In order to
resolve this problem of spatial autocorrelation in regression residuals,
the function lmFilter() estimates a spatially filtered
linear regression model using an unsupervised stepwise regression (or a
lasso-based selection) to identify relevant eigenvectors derived from
the transformed connectivity matrix. Below, the unsupervised eigenvector
search algorithm selects eigenvectors based on the reduction in residual
autocorrelation. The output is a class spfilter object.
# ESF model
(lm.esf <- lmFilter(y = y, x = X, W = W, objfn = 'MI', positive = TRUE,
ideal.setsize = TRUE, tol = .2))
#> 9 out of 22 candidate eigenvectors selected
summary(lm.esf, EV = TRUE)
#>
#> - Spatial Filtering with Eigenvectors (Linear Model) -
#>
#> Coefficients (OLS):
#> Estimate SE p-value
#> (Intercept) 8.979538 0.67359052 6.321380e-23 ***
#> beta_1 1.023918 0.08095813 1.379178e-21 ***
#>
#> Adjusted R-squared:
#> Initial Filtered
#> 0.4673945 0.7271686
#>
#> Information Criteria:
#> AIC AICc BIC
#> Initial 425.4662 425.5899 430.6766
#> Filtered 366.9404 369.9404 395.5973
#>
#> Filtered for positive spatial autocorrelation
#> 9 out of 22 candidate eigenvectors selected
#> Objective Function: "MI"
#>
#> Summary of selected eigenvectors:
#> Estimate SE p-value partialR2 VIF MI
#> ev_13 -9.623056 1.443934 2.147786e-09 0.23208263 1.005781 0.6302019 ***
#> ev_4 -3.117054 1.478348 3.780050e-02 0.02873360 1.049729 0.9257835 *
#> ev_10 -5.465326 1.450142 2.944403e-04 0.07901543 1.013360 0.7303271 ***
#> ev_2 4.799492 1.440055 1.253732e-03 0.05886102 1.001118 1.0004147 **
#> ev_9 3.577483 1.466525 1.669440e-02 0.03071488 1.034085 0.7638378 *
#> ev_21 4.082455 1.445443 5.846347e-03 0.04093631 1.007610 0.4539879 **
#> ev_5 -2.924657 1.448955 4.655373e-02 0.02055372 1.011899 0.8968632 *
#> ev_19 3.789599 1.439787 1.000406e-02 0.03671349 1.000798 0.4615722 *
#> ev_14 2.222939 1.457704 1.308151e-01 0.01140690 1.022793 0.6121155
#>
#> Moran's I ( Residuals):
#> Observed Expected Variance z p-value
#> Initial 0.35056797 -0.01192610 0.01207299 3.2990854 0.0004850019 ***
#> Filtered -0.05084639 -0.08474192 0.05080919 0.1503735 0.4402349689While the print method shows that 9 eigenvectors were
selected from the candidate set consisting of 22 eigenvectors, the
summary method provides additional information. Besides the
ordinary least squares (OLS) parameter estimates, the output shows that
the ESF model filters for positive spatial autocorrelation using the
minimization of residual autocorrelation as objective function during
the eigenvector search. A comparison between the filtered and the
nonspatial OLS model with respect to model fit and residual
autocorrelation is also provided. Since the option EV is
set to TRUE, the summary method also displays
information on the selected eigenvectors. As the results show, the ESF
model successfully removes the spatial pattern from model residuals.
The plot method allows for an easy visualization of the
results. The graph displays the Moran coefficient associated with each
of the eigenvectors. The shaded area signifies the candidate set and
selected eigenvectors are illustrated by black dots.
plot(lm.esf)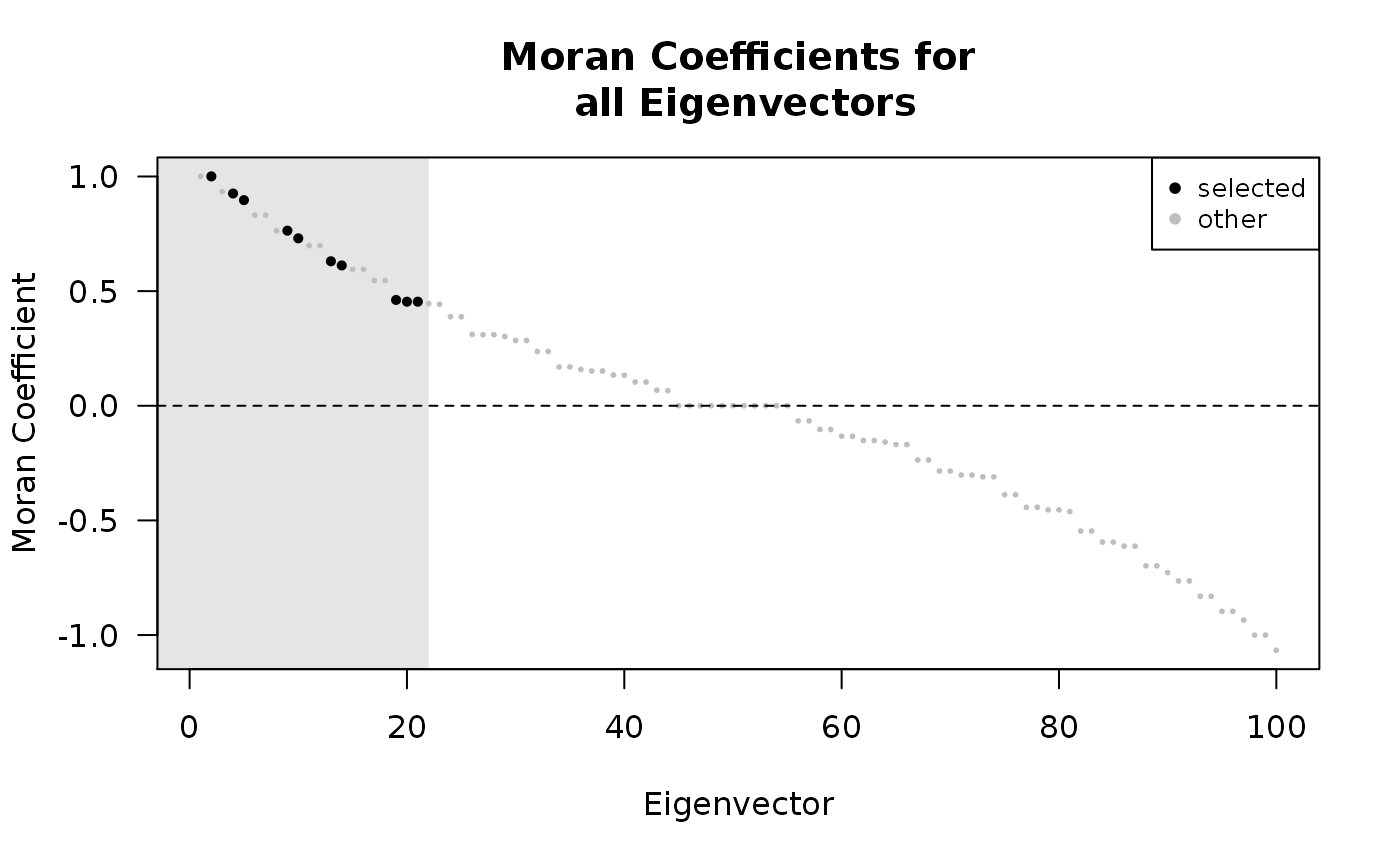
Moreover, lmFilter() also allows users to select
eigenvectors based on alternative selection criteria:
### Alternative selection criteria:
# maximization of model fit
lmFilter(y = y, x = X, W = W, objfn = 'R2', positive = TRUE, ideal.setsize = TRUE)
#> 11 out of 22 candidate eigenvectors selected
lmFilter(y = y, x = X, W = W, objfn = 'AIC', positive = TRUE, ideal.setsize = TRUE)
#> 10 out of 22 candidate eigenvectors selected
lmFilter(y = y, x = X, W = W, objfn = 'AICc', positive = TRUE, ideal.setsize = TRUE)
#> 9 out of 22 candidate eigenvectors selected
lmFilter(y = y, x = X, W = W, objfn = 'BIC', positive = TRUE, ideal.setsize = TRUE)
#> 7 out of 22 candidate eigenvectors selected
# significance of residual autocorrelation
lmFilter(y = y, x = X, W = W, objfn = 'pMI', sig = .1, bonferroni = FALSE,
positive = TRUE, ideal.setsize = TRUE)
#> 3 out of 22 candidate eigenvectors selected
# significance of eigenvectors
lmFilter(y = y, x = X, W = W, objfn = 'p', sig = .1, bonferroni = TRUE,
positive = TRUE, ideal.setsize = TRUE)
#> 3 out of 22 candidate eigenvectors selected
# all eigenvectors in the candidate set
lmFilter(y = y, x = X, W = W, objfn = 'all', positive = TRUE, ideal.setsize = TRUE)
#> 22 out of 22 candidate eigenvectors selected
# Moran's I lasso
lmFilter(y = y, x = X, W = W, objfn = 'MI-lasso', positive = TRUE, conditional.se = TRUE)
#> 31 out of 31 candidate eigenvectors selectedIf users wish to select eigenvectors based on individual selection
criteria, they can obtain the eigenvectors using the function
getEVs() and perform a supervised selection procedure using
the basic stats::lm()
command.
Extension to Generalized Linear Models
The ESF approach outlined above easily extends to generalized linear
models (GLMs) as well (see also Griffith, Chun,
and Li 2019). Therefore, the spfilteR package
contains the function glmFilter() which uses maximum
likelihood estimation (MLE) to fit a spatially filtered GLM and performs
an unsupervised eigenvector search based on alternative objective
functions.
Except for minor differences, glmFilter() works similar
to the lmFilter() function discussed above. The option
model defines the model that needs to be estimated.
Currently, unsupervised spatial filtering is possible for logit, probit,
poisson, and negative binomial models. Moreover, the option
optim.method specifies the optimization method used to
maximize the log-likelihood function. Finally, resid.type
allows users to define the type of residuals used to calculate Moran’s
I and boot.MI is an integer specifying the number
of bootstrap permutations to obtain the variance of Moran’s
I.
# define outcome variables
y.bin <- fakedataset$indicator
y.count <- fakedataset$count
# ESF logit model
(logit.esf <- glmFilter(y = y.bin, x = NULL, W = W, objfn = 'p', model = 'logit',
optim.method = 'BFGS', sig = .1, bonferroni = FALSE,
positive = TRUE, ideal.setsize = FALSE, alpha = .25,
resid.type = 'deviance', boot.MI = 100))
#> 6 out of 31 candidate eigenvectors selected
# ESF probit model
(probit.esf <- glmFilter(y = y.bin, x = NULL, W = W, objfn = 'p', model = 'probit',
optim.method = 'BFGS', sig = .1, bonferroni = FALSE,
positive = TRUE, ideal.setsize = FALSE, alpha = .25,
resid.type = 'deviance', boot.MI = 100))
#> 6 out of 31 candidate eigenvectors selected
# ESF poisson model
(poisson.esf <- glmFilter(y = y.count, x = NULL, W = W, objfn = 'AICc', model = 'poisson',
optim.method = 'BFGS', positive = TRUE, ideal.setsize = FALSE,
alpha = .25, resid.type = 'deviance', boot.MI = 100))
#> 9 out of 31 candidate eigenvectors selected
# ESF negative binomial model
(nb.esf <- glmFilter(y = y.count, x = NULL, W = W, objfn = 'AICc', model = 'nb',
optim.method = 'BFGS', positive = TRUE, ideal.setsize = FALSE,
alpha = .25, resid.type = 'deviance', boot.MI = 100))
#> 0 out of 31 candidate eigenvectors selectedAgain, if users wish to define individual selection criteria or fit a
GLM currently not implemented in glmFilter(), they can
obtain the eigenvectors using the getEVs() command and
perform supervised eigenvector selection using the standard stats::glm()
function.